2020年11月25日
コベルコ建機株式会社
株式会社安藤・間
コベルコ建機株式会社(本社:東京都品川区、代表取締役社長:尾上善則、以下、コベルコ建機)と株式会社安藤・間(本社:東京都港区、代表取締役社長:福富正人、以下、安藤ハザマ)は、このたび、油圧ショベルの自動運転技術の確立に向けた実証実験を実施いたしました。
コベルコ建機は、「誰でも働ける現場へ KOBELCO IoT」をテーマにICTロードマップを策定し、その実現に向けて中長期的に研究・開発を進めており、建設機械の自動運転技術の確立はそのひとつの柱となります。具体的には、すでに商品化されている各種運転支援機能※1 の拡充を始めとし、段階的に自動運転の高次元化を進めることで、建設現場の生産性向上や、現場無人化による本質的な安全確保などが可能になると考えています。
安藤ハザマは、現場生産性の向上を目指し、以前から振動ローラの自動運転などの実用化を進めてきましたが、油圧ショベルの自動運転には高度な技術が必要なことから建設機械メーカーとの共同研究を検討してきました。
両社は油圧ショベルの自動運転推進に向けた研究開発を促進するために、お互いの強みを活かして共同研究をおこなうこととし、2019年4月に共同研究に関する協定を締結しました。共同研究において、コベルコ建機は主に自動運転の油圧ショベルシステム開発を、安藤ハザマは現場へ適用するための施工と安全に対する管理システム開発や現場運用ルール化を担うこととしています。
本格的な共同研究に向け、2019年秋に、安藤ハザマが施工中の国内ダム建設現場において、タブレット端末を利用したティーチングとプレイバック※2 による油圧ショベルの単純な自動運転作業の実証実験をおこないました。
それを踏まえ2020年11月、安藤ハザマの技術研究所において、重機オペレータ1名が通常の油圧ショベルを操作しながら自動運転ショベルの運転管理をおこなう実証実験を実施しました。具体的には、自動運転ショベルが土砂の掘削からダンプトラックへの積み込みをおこない、その土砂の供給をもう1台の油圧ショベルが手動運転でおこなうというものです。
今回の実証実験では、自動運転に必要とされる「認知」「判断」「操作」などの要素技術のうち、「認知」にAIを適用させることで、物体認識、距離測定などをおこない、その情報から目標位置を自動調整することで現場での状況変化に対応できることを確認しました。また、プレイバック中の自動運転状況は、作業者がリアルアイムにタブレット端末で確認可能でした。
加えて、今回の実証実験では、バケット爪先の3次元軌跡をリアルタイムに計測しました。計測データは、将来的に自動運転の監視や施工状況の管理に利用可能であると考えています。
コベルコ建機と安藤ハザマは、これらの共同研究の成果をもとに、自動運転の高度化と実用化に向けこれからも協力してまいります。


実証実験における自動運転の様子
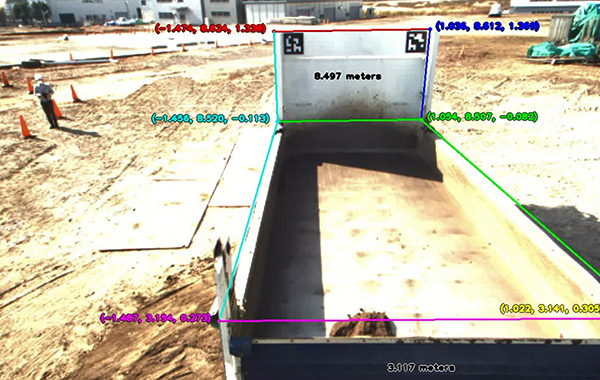
実証実験の様子(ダンプトラックの荷台自動検知)
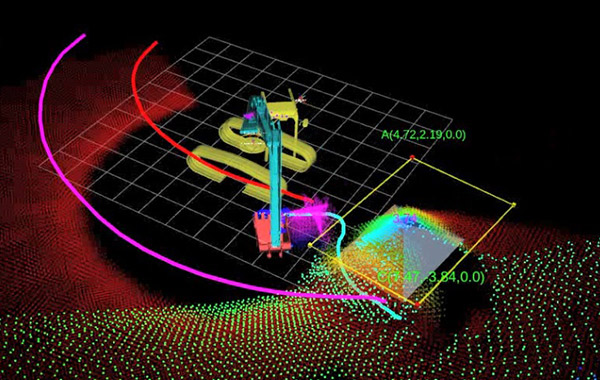
実証実験の様子(土砂山検知/バケット軌跡のイメージ)
*記載されている情報は発表時のもので、予告なしに変更される場合があります。
以上



