2020年12月1日
コベルコ建機株式会社
コベルコ建機株式会社(本社:東京都品川区、代表取締役 社長:尾上善則、以下、コベルコ建機)は、この度、コベルコ建機の目指す「働く人を中心とした、建設現場のテレワークシステム」K-DIVE CONCEPT※1 実用化に向け、実際の稼働現場における遠隔操作検証を2020年11月より開始しました。
コベルコ建機は、「誰でも働ける現場へ KOBELCO IoT」をテーマにICTロードマップを策定し、その実現に向けて中長期的に研究・開発を進めています。そのひとつの柱であるK-DIVE CONCEPTは、クラウドマッチングシステムと建設機械の遠隔操作を融合させることで、特定の人・場所・時間などの制約を受けずに、建設現場での施工が可能となる「建設現場のテレワーク化」を目指しています。この実現により、深刻化する建設技能者の不足に対する多様な人材活用、現場生産性の向上、現場無人化による本質的な安全確保などが可能になると考えています。
K-DIVE CONCEPTは、ステップ1として「近距離での遠隔操作」、ステップ2として「遠距離での遠隔操作」、最終的な目標であるステップ3として「クラウドマッチングシステムと遠隔操作の融合」に向け、段階的な研究・開発を進めています。
今回の検証(ステップ1:近距離での遠隔操作)は、K-DIVE CONCEPTに強く関心をお持ちいただいた産業振興株式会社(以下、産業振興)様に全面的にご協力いただき実現したもので、過去何度かのトライアルを経て、今回の継続的な実作業による検証開始となりました。具体的には、産業振興様の事業所内スクラップヤードにて、ローカル無線通信環境を利用し、ヤード内事務所から約100mはなれた現場にある当社35tクラスのリフティングマグネット仕様機(油圧ショベルをベースとしたハンドリング機械)を「近距離」遠隔操作するものです。
K-DIVE CONCEPTの「近距離」遠隔操作は、実際に機械に搭乗して操作した場合とほぼ同等の品質(通信速度、作業効率等)での操作が可能な段階にあり、今回の検証は、1年程度の長期にわたって実作業をおこなうことで、商用化に向けた最終確認と位置付けています。
今後も、長距離での遠隔操作や多地点接続、第5世代移動通信システム(ローカル5G)との接続活用など、K-DIVE CONCEPTの段階的な実用化に向けた取り組みを継続してまいります。
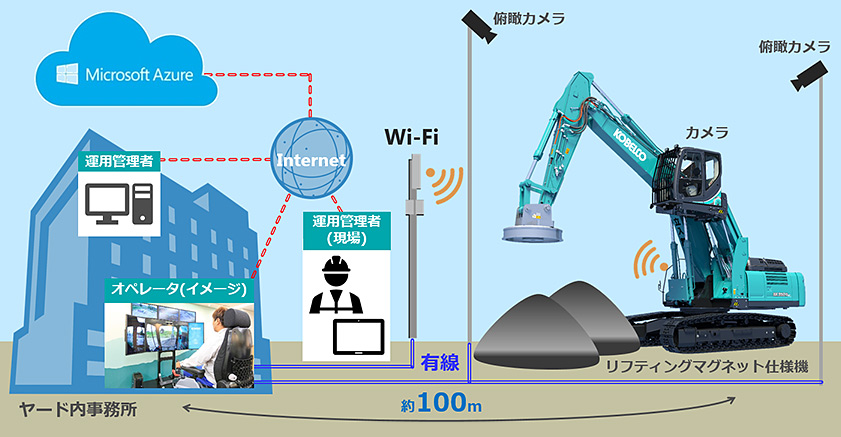
実用化検証のイメージ

実用化検証の様子(事務所内での遠隔操作)

実用化検証の様子(ヤードでの稼働)
<ニュースリリース同時公開ムービー>
<ご参考>
以上
*記載されている情報は発表時のもので、予告なしに変更される場合があります。



