2022年1月13日
コベルコ建機株式会社
株式会社安藤・間
コベルコ建機株式会社(本社:東京都品川区、代表取締役社長:尾上善則、以下、コベルコ建機)と株式会社安藤・間(本社:東京都港区、代表取締役社長:福富正人、以下、安藤ハザマ)は、このたび工事現場における実作業環境において油圧ショベルの自動運転に関する実証実験を実施いたしました。
コベルコ建機は「誰でも働ける現場へ KOBELCO IoT」をテーマにICTロードマップを策定し、その実現に向けて中長期的に研究・開発を進めており、建設機械の自動運転技術の確立はそのひとつの柱となります。具体的には、すでに商品化されている各種運転支援機能※1の拡充を始めとし、段階的に自動運転の高次元化を進めることで、建設現場の生産性向上や、現場無人化による本質的な安全確保などが可能になると考えています。
安藤ハザマは、現場生産性の向上を目指し、以前から振動ローラの自動運転などの実用化を進めてきましたが、油圧ショベルの自動運転には高度な技術が必要なことから建設機械メーカーとの共同研究を検討してきました。
両社は油圧ショベルの自動運転推進に向けた研究開発を促進するために、お互いの強みを活かして共同研究をおこなうこととし、2019年4月に共同研究に関する協定を締結しました。共同研究において、コベルコ建機は主に油圧ショベルの自動運転システム開発を、安藤ハザマは現場へ適用するための施工と安全に対する管理システム開発や現場運用ルール化を担うこととしています。
2019年秋にはティーチングとプレイバック※2による油圧ショベルの単純な自動運転の実証実験を、2020年秋には土砂形状、ダンプトラックの荷台位置をAIで認知し、掘削、積み込み位置を自動調整することで現場の状況変化に対応できることの実証実験をおこないました。
さらに2021年12月、安藤ハザマが施工中の工事現場の実作業環境において油圧ショベルの自動運転の実証実験をおこないました。今回の実証実験は、2019年より両社が共同で実施している建設機械の自動運転技術の確立に向けた取り組みをより高度化したもので、実作業現場で求められる様々な制約条件(ダンプトラックへの横方向からの積み込み、土砂をこぼさないような滑らかな動作、周辺物との接触回避)に適応させました。
また、ペイロード機能※3を搭載することにより、積み込んだ積算重量が目標値となるまで自動運転が継続され、掘削毎に変化する掘削重量を把握しながら最適な積み込み作業が可能となっています。
安全面では、油圧ショベルの稼働範囲に近づく物体を監視支援する装置を現場に設置し、その有効性検証も同時におこないました。AIにより侵入物体や人を検知・認識、距離測定することで、その情報から危険度に応じた各種警報を自動的に発報し、安全性の向上と常に人間が目で見て判断する監視作業の負担軽減につながります。
今回の実証実験により、実作業環境においても自動運転に必要とされる基本的な機能や安全確保の仕組みが問題なく動作することを確認できたことで、建設現場での生産性向上や安全確保に向けた自動運転の実用化に大きく近づきました。
コベルコ建機と安藤ハザマは、これらの共同研究の成果をもとに、自動運転の高度化と実用化に向けこれからも協力してまいります。

実証実験における自動運転の様子
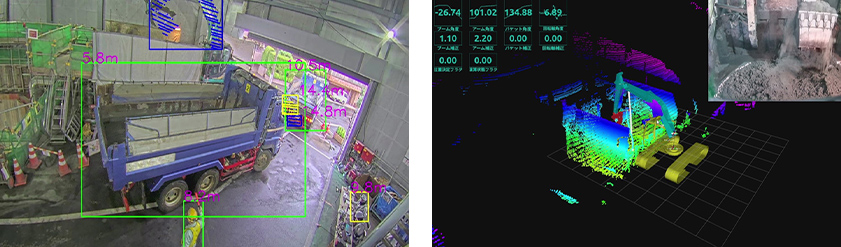
左:監視支援システムによる検知イメージ、右:自動運転の検知イメージ
以上
*記載されている情報は発表時のもので、予告なしに変更される場合があります。



